PWM and Regulators¶
Page elements¶
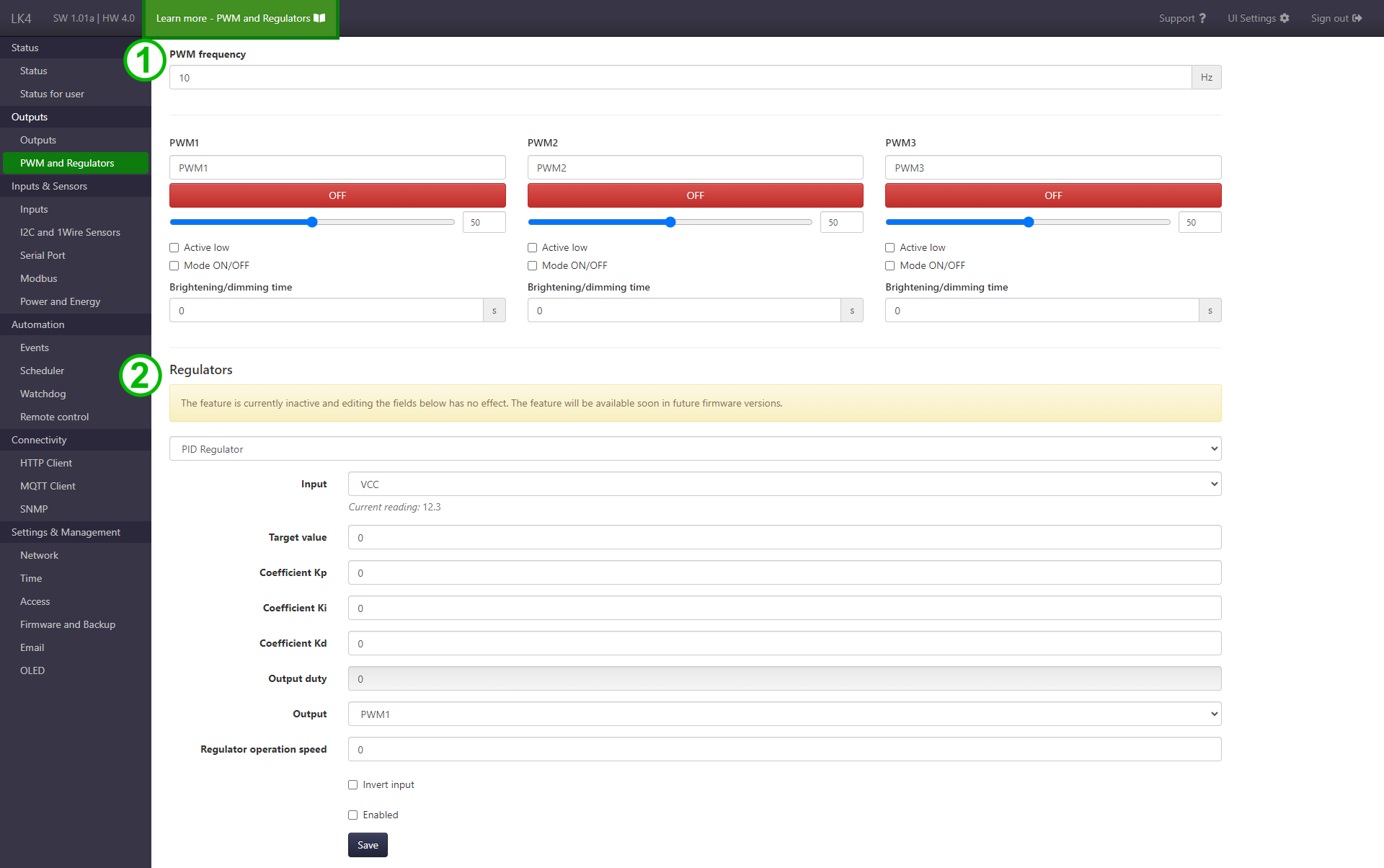
-
Configuration of PWM outputs.
- Frequency setting fields for PWM1 - PWM3 outputs (identical value for the whole group).
-
Names, control and configuration of PWM outputs.
In the upper part, there are name setting fields, output switch buttons, a slider and a fill factor setting field.
In the bottom part there are configuration fields:
- Active low - serves to reverse the switch and fill factor.
- Mode ON/OFF - when this field is checked, the PWM output changes into a two-state output: on/off.
- Brightening/dimming time - when set, PWM duty cycle will be changed over time, defined in this field (in seconds).
-
Regulator configuration section, described below.
Regulators¶
The feature is under development.
PID controller¶
The PID controller is used to control the PWM output depending on the input parameter so as to obtain the minimum error, ie the difference between the set point and the measured value.
A typical example of use is to control the heater's power to maintain the set temperature. Operation via PWM fill factor, in contrast to 2-state operation (on / off) with hysteresis.
The regulator contains three elements (coefficients):
- proportional Kp - compensates for the current error
- integral Ki - compensates for the accumulation of past errors
- derivative Kd - compensates for the expected error in the future
Currently, the PID controller is experimental and you should test the operation of the system before leaving it unattended.